
Dane Kouttron
This project / write up is in progress, check back for more soon!
Project Started: 09/2024

Can a modern GoPro mascarade as a multichannel data logger?Modern action cameras are amazing and also feature the ability to connect to external hardware over Bluetooth. The goal here is to connect sensors to an external micro controller [esp32], pair it with a gopro and data-log those variables to the files that are recorded onboard. |
How hard could adding *wireless* multichannel data recording to a closed source camera really be?

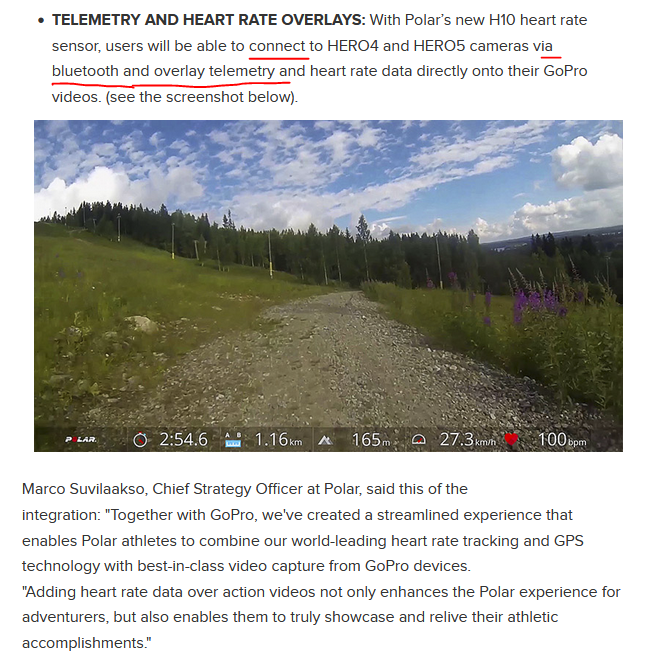
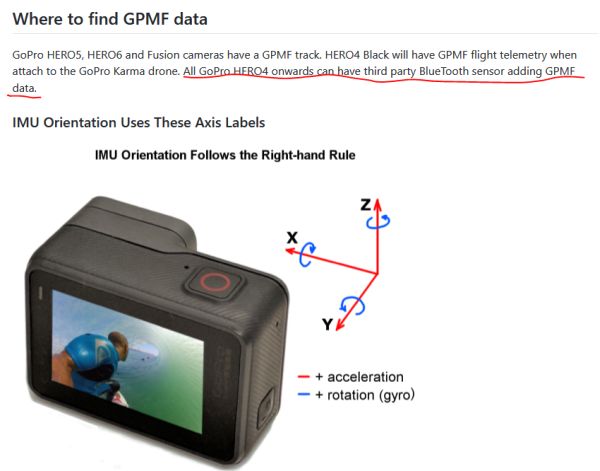
An Intro to GPMFyada An Intro to GPMFFollowing the GoPro Hero 4, camera's support the GPMF format or the GoPro Metadata Format, described here: [link] and also here [link]. This is a data layer added to a video file to store sensor data, like GPS coordinates, accelerometer data, etc. This data can be logged synchronously with the video source which makes adding an overlay incredibly convienient. This also is super helpful if you're recording some instrument data, that can be extract-able afterwards in software. We're going to start by evaluating GPMF, learn how it works and learn how we can sneak some external sensor data into a camera.
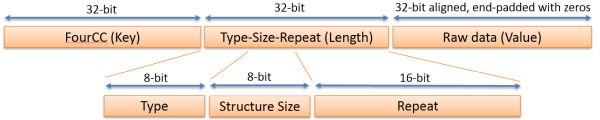
What is Key Length Value?
|



| FourCC Key Name |
Definition | Comment |
|---|---|---|
| DEVC | unique device source for metadata | Each connected device starts with DEVC. A GoPro camera or Karma drone would have their own DEVC for nested metadata to follow. |
| DVID | device/track ID | Auto generated unique-ID for managing a large number of connect devices, camera, karma and external BLE devices |
| DVNM | device name | Display name of the device like "Karma 1.0", this is for communicating to the user the data recorded, so it should be informative. |
| STRM | Nested signal stream of metadata/telemetry | Metadata streams are each nested with STRM |
| STNM | Stream name | Display name for a stream like "GPS RAW", this is for communicating to the user the data recorded, so it should be informative. |
| RMRK | Comments for any stream | Add more human readable information about the stream |
| SCAL | Scaling factor (divisor) | Sensor data often needs to be scaled to be presented with the correct units. SCAL is a divisor. |
| SIUN | Standard Units (like SI) | If the data can be formatted in GPMF's standard units, this is best. E.g. acceleration as "m/s²". SIUN allows for simple format conversions. |
| UNIT | Display units | While SIUN is preferred, not everything communicates well via standard units. E.g. engine speed as "RPM" is more user friendly than "rad/s". |
| TYPE | Typedefs for complex structures | Not everything has a simple repeating type. For complex structure TYPE is used to describe the data packed within each sample. |
| TSMP | Total Samples delivered | Internal field that counts all the sample delivered since record start, and is automatically computed. |
| TIMO | Time Offset | Rare. An internal field that indicates the data is delayed by ‘x’ seconds. |
| EMPT | Empty payload count | Internal field that reports the number of payloads that contain no new data. TSMP and EMPT simplify the extraction of clock. |
More interesting FOURCC variables
There isnt really a fully defined table of all of the FOURCC key names, but here are a few that are interesting that we may be able to adopt . The supported FOURCC variables also change with the vintage of the camera, some are only implemented on recent versions, while others trace back to the HERO 4 series. Of these FACE seems interesting as it, in itself, is a structured data format and probably unused for the most part. We do find a list of FOURCC variables from exiftool[link]. We need to determine if these are writeable from an external source next.
| FourCC Key Name |
Property | approximate frequency (Hz) | SIUN or UNIT | Comment |
|---|---|---|---|---|
| ACCL | 3-axis accelerometer | 200 | m/s² | Data order Z,X,Y |
| GYRO | 3-axis gyroscope | 400 | rad/s | Data order Z,X,Y |
| ISOG | Image sensor gain | 24, 25 or 30 (based video frame rate) | n/a | HERO5 v2 or greater firmware |
| SHUT | Exposure time | 24, 25 or 30 (based video frame rate) | s | HERO5 v2 or greater firmware |
| FACE | Face detection boundaring boxes | 12, 12.5 or 15 (based video frame rate) | n/a | struct ID,x,y,w,h HERO6 or greater firmware |
| FCNM | Faces counted per frame | 12, 12.5 or 15 (based video frame rate) | n/a | struct ID,x,y,w,h HERO6 or greater firmware |
So we have two FOURCC variable we should be able to re-use, FACE and FCNM. These seem oddly specific and I somewhat doubt a Hero 6 [2017] had the computational horsepower to track faces while recording video. Of these two, FCNM seems fairly reasonable to get a single channel of 12-15hz data acquisition at 32bit depth.
Concluding Remarks:
Have you noticed that there are no
advertisements or ridiculous pop ups?
No cookie banner or newsletter?
I'm trying to make a better web, feel free to support it.
Want More?
Here's a behind the scenes look at my work space and some of the images that did not make the cut to be included in the write-up:

If you have questions or comments, ask below or send an email
Post your comments! |
|
Comment Box loading
|