Dane.Kouttron
[7.16.19] Hydro-Foiling On A Small Rowboat
| Have you seen the absurd racing
sailboats flying about on their hyper-fancy racing
hydrofoils? Want the same experience but on a 10' rowboat? |
| What? |
Outboard
Recovery Part 1 |
Cleaning and Prep | Time for Paint | Brushless Motor Mounting | First Test | Testing Notes | Conclusion | Image Directory |
| Does
your rowboat dream of electric wings? |
|
Isn't it fantastic? Is this implement-able on small scale watercraft? Row-boat scale? Tune in below to find out more! |
| TIME TO DO SOME HISTORICAL DIGGING |
| On the last episode we |
| I ended up stumbling on this site [link] which had a number of academic papers on hydrofoil designs. |
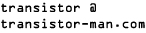
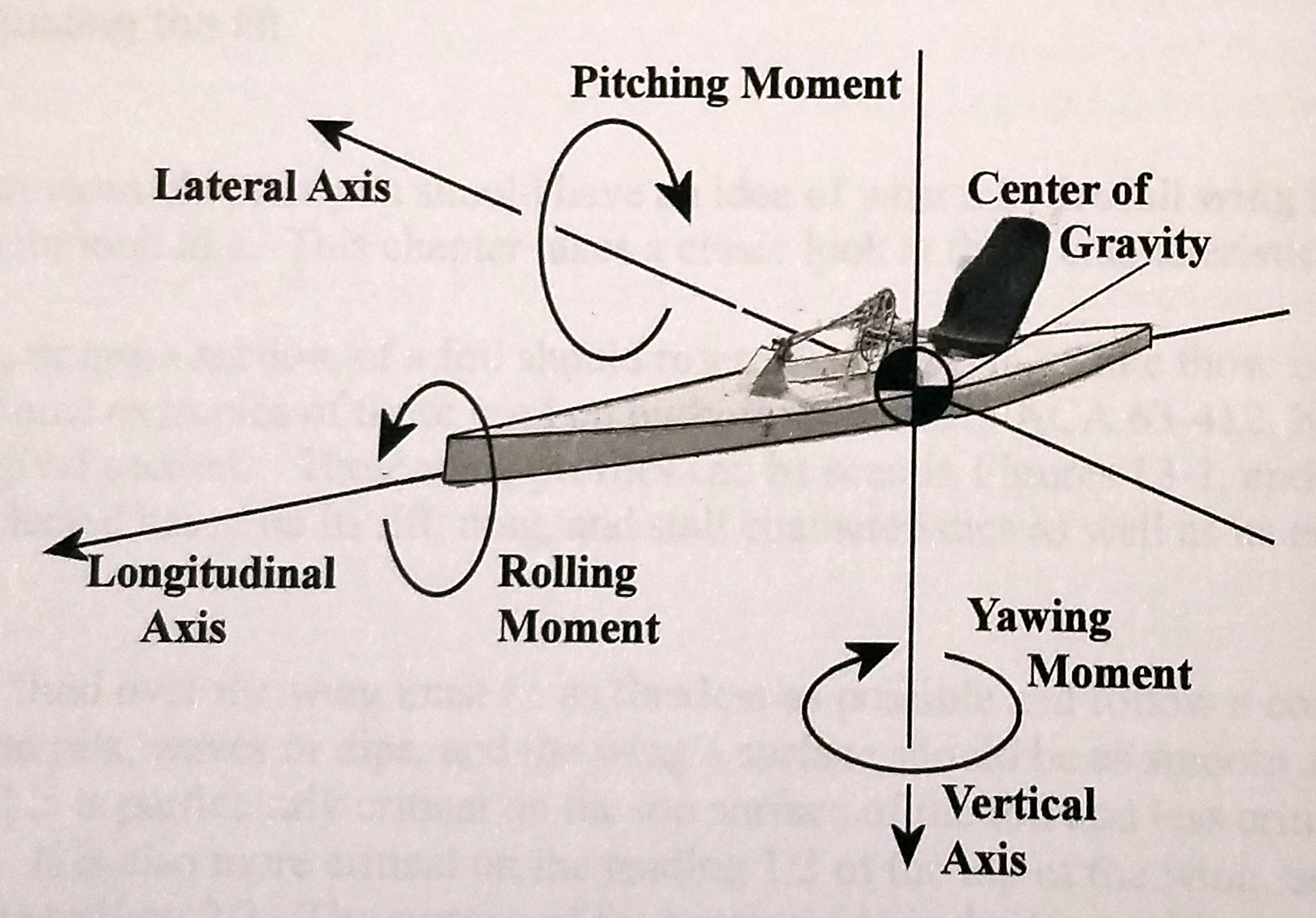
The first
work I read through was quite excellent, its Hydrofoil
Craft Dynamics In a realistic Sea Including
Automatic Control. I checked and its
not copyright'd so I OCR'd a version and its
available here [link].  Lets actually dig deep in this one. I'm going to use snippets here to make sense of things. First off This is a report for the Naval Ship Systems Command, Department of the Navy. |
 |
 |

 So lets
start from the beginning, behold a 'Jon Boat' aka
a 10' roughly buoyant aluminum watercraft. These
can be found on Craigslist off-season for 200-400
$ and are remarkably fun, while being lightweight
enough to put on a medium-sized vehicle roof. They
vary from 9-12 ft long and are born for low speed
fishing related activities. Ok so this is what
we're working with: So lets
start from the beginning, behold a 'Jon Boat' aka
a 10' roughly buoyant aluminum watercraft. These
can be found on Craigslist off-season for 200-400
$ and are remarkably fun, while being lightweight
enough to put on a medium-sized vehicle roof. They
vary from 9-12 ft long and are born for low speed
fishing related activities. Ok so this is what
we're working with: |
|
| Ok time to take some
measurements and make cad models. |
|
Note this is a fairly rough model, the actual row-boat / jon-boat has a curved front, there are two seats, etc. The goal was to capture the important dimensions & mount points to allow for a quick modeling and iteration. There are a few overriding goals in this design:
|
|
|
|
CAD ->
Fabricate: Front Wing Pivot Mount & OMAX
Waterjet
To do this quickly I opted to waterjet some 1/4" 6061 aluminum plate. Shown is an OMAX, the cut time for the front pivot mount was ~18 minutes, the nice part about designing for waterjet based fabrication is how quickly the parts can be rough assembled, then welded up. Note there are some cutouts shown, the rectangular cutouts are to allow for some cookie-cutter-style design, where the mating parts not only can be welded from the working side of the part but also from the through-hole tabbed side. |
|
Waterjet
-> Weldment: Fixturing and Tig welding
For surface prep I used ethanol and a wire brush, at the beginning I opted for outer-facing welds and then subsequently worked my way in. As a note 1/4" aluminum plate is a fairly huge heat-sink, so a good amount of time was used to pre-heat the part. My tactic for pre-heating is to wave the tig arc over the surface I plan on welding for a fairly significant amount of time, which is shown a bit in the sped-up clip shown right. The welder used was a 200A Dynasty, with an ambient water-cooled head. Nominal welding current was 150A max. Given that the large hole going between the left and right weldment need some fairly precise alignment, i should have opted to make a pin to keep the two holes concentric, fortunately the clamping and fixturing kept both remarkably aligned. |
|
Weld
Cleanup
As the front foil pivot is fairly visible and prominent, I sanded down the weld surfaces to improve the finish. Note only the outer surfaces were welded, the inner cavities were tacked in place but the advantage of fully welding the part was fairly limited. Another point of reference, making long continuous weld-beads on aluminum also provides a fairly straight path for cracks to form, as such the welds were periodically interrupted. The abrasive disks I'm using here are nominally called 'flappy disks or flap disks', they are basically small sheets of sandpaper attached radially to a base. I used a 120 grit flap disk for the coarse removal and then a 300 grit disk for final cleanup. Yes I'm still using an 18v dewalt and its impressive how quick it chews thru the 2ah 18v a123 era dewalt packs. |
|
Many
Many Weldments and sub-assemblies
The front foil pivot mount is not the only weldment, there are many more aluminum widgets. The foil braces, foil mounts and other pivot hardware all came together after a power-hour of welding and subsequent cleanup. |
|
Preparing
the Rear-Foil external mount plates
To keep with the theme of allowing the foils to be removed quickly and not heavily interfere with the watercraft, the mounts for the rear foils purposely have very little sticking out into the flowing water. To do this i opted for 3/8-16 recessed Flathead Allen key screws. This is a fair amount of recessing and to do so I used one of my favorite countersinks, a vibration-resistant through hole countersink. This same bit was used to countersink hardware on the Valkyrie battle-bot base frame. |
|
Attaching
the outside of the foil mounts
The goal of the rear foil mounts is easy-to-remove, and as such the outer plate is literally a breadboard for plugging in different foil designs. That first outer plate becomes a 'permanent' part of the vessel. Around the perimeter of the attachment points are eight separate 1/4-20 threaded holes for attaching various mounts. To help reduce water ingress, silicone is used around the holes thru the shell. |
|
Bolting
together the rear-foil mount points
The flathead 3/8-16 bolts pass thru the hull and mate to an inner weldment that transfers both foil forces into the hull and out to the outboard. Silicone was used again to provide some sealant on the mating holes. 3/8-16 nylock locking nuts were used to sandwich the whole assembly together. After everything sat for an hour the outer perimeter was cleaned up and a small bead of silicone was routed around the inner facing sub-assembly. zzzzz |
|
Updating
the Labeling: Wub Craft
I noticed that the boat had labeling at one point in its previous life. Apparently starcraft is not only a video game but also a rowboat. The angle grinder is already within arms reach, so its time to update the crafts labeling on both sides. I was surprised that the plastic labels were riveted in place, but it probably works way better than an epoxy. To make the new labeling I found a similar font, sorted the scaling and went for a similar design. 'Wub' is my proverbial interchangeable unit of force/frequency/magnetic field strength/current/wattage. Interestingly this is a fairly low key label, so much so that only one or two folks noticed it while helping unload the craft. It fits in remarkably well. |
|
Wait, I
want to see how that logo was made
Here's the waterjet with the splash-guard removed so the cut path is more visible. This is 1/8" 6061 aluminum sheet. Note the footage starts after all the pierce cuts as the pierces cause a lot of ejecta / splashing. Aren't water-jets amazing? The brown material is the garnite that is injected into the water-stream to aide in cutting. The abrasive is consumed during the process of cutting. Note that both orientations of this logo were cut, so both sides of the craft matched : ] |
|
Adding
some character: Ginormous googly-eyes  I purchased some comically large googly eyes in a two-pack. To get them to survive on the rowboat, they're going to need some type of holder, generally these are actually backed by laminated cardboard so water ingress can cause problems. I'm going to opt for the same route I took on the snow-blower robot googly eyes: lasercut plastic thermally formed to match whatever mounting angle makes sense. |
|
Googly Eye Holder
When designing for lasercut parts its sometimes important to avoid un-necessairlly large open cutouts. The googly eye assembly is actually three parts, the base, and two eye-holder ring-lets. By splitting the two the parts waste less source material. |
|
With the cad hastily completed, i grabbed some 1/8" / 3mm acetyl stock and ran the cut on a 120w Epilog co2 laser cutter. Both Eyes were cut from scrap stock and came out excellent. I sized the outer ring to grab onto the lip of the googly eye, partially to keep it mechanically constrained and in part to make assembly easier. |
|
Googly
Assembly Time   To assemble these i just used small M4 Phillips 10mm screws and nylocks. If I had thicker backing material I may have been able to get away with self-tapping plastite screws, but overall this was fairly quick. RTV was added around the perimeter of the googly eye to prevent water ingress, as the backing material was likely made of thin cardboard |
|
| Thermal Bending Acetal / Delrin To get the right angle on the bottom, I opted for a simple thermal bend. This is fairly straightforward, but there are a few key takeaways
|
|
  With the folds complete I did a quick mock-up of where i wanted them to sit. Spaced just about to the ends had the maximum goof factor. It should be pretty obvious that these are not intended to be installed all the time, so to make them easily removable I opted for small thumbscrews. To make a solid mounting point I used rivet-nuts, which are my new favorite thing. Want to put a threaded boss in some thin plate? RIVET NUT IS HERE FOR YOU |
|
Adding
In Rivet Nuts
This was a really good use for a rivet nut, the thin aluminum sheet on the top front of the boat is too put threads into, the underside is awkward to get to for holding a nut and tension-ing from the top. Shown is attaching the rivet nuts, its not the best view, but the tool shown basically applies force to deform the nut to get it to hold in place on the thin sheet metal. With these installed, each googly-eye gets a thumbscrew for quick attach/ removal from the boat. |
|
Googly Eye Reveal
Look at how wonderful this silly creature looks. |
|
| Bill Of materials |
Price
& Quantity |
Media |
| Giant
Googly Eyes (7" diameter) These were fairly well made, but had a laminated cardboard backing. To prevent the backing from getting wet i opted for a fairly substantial amount of RTV / silicone to limit water ingress. [link] |
$12.29
USD / 2 |
|
| Surface Follower (Floaties) I needed something buoyant to follow the water's surface in front of the craft, and admittedly a bit last-minute. These worked well in a pinch, and were literally held on by some long wood screws. [link] |
$11.99
USD Each |
 |
{kind=link}
| Solid part files |
|
(There's
other
photos in the photo gallery)
Concluding Remarks:- Silly watercraft are incredibly fun. There's something excellent about a quiet electric outboard on a small watercraft zipping along. Tackling the hazards and challenges of electric propulsion in a small conductive craft is a fun challenge, but should only be undertaken carefully and with quite a bit of caution. Its a good idea to use safety hardware and a colleague in a chase vehicle when testing out experimental watercraft
- Bring a paddle if your testing an experimental boat.
- Water is incredibly viscous and the amount of energy required to move a flat bottomed boat is increasingly impressive. Velocity appears to go by the cube of energy, which nominally makes sense traveling at 60mph on a reasonable sized craft requires in excess of 100kw. The only way to go faster with less is to limit the actual viscous contact area. For a flat-bottomed boat thats, well not trivial. Some pontoon craft get around this issue by reducing their water footprint to only the submerged section of the pontoons themselves.
If you have questions or comments, ask below or send over an email.
| Comments: |
|
HTML Comment Box
is loading comments...
|
Stay safe when working with electrons in aqueous environments. Also wear sunscreen, I'm not responsible for your newly acquired farmers tan : ]
Dane.Kouttron
Rensselaer Polytechnic
Institute
Electrical & Electrical
Power
631.978.1650